
NVH Source Locator는 오실로스코프 또는 측정 시스템에서 캡처된 가속도계 신호의 TDOA(Time Difference of Arrival)를 사용하여 소음 및 진동 소스를 찾는 측정 도구입니다.
이 가이드는 모든 기능을 다룹니다. 빠른 복습은 빠른 참조를 참조하세요.
소음 소스가 소리나 진동을 방출하면 파동은 알려진 속도로 재료를 통과합니다. 재료에 가속도계 두 개 이상을 배치하고 파동이 각각에 도달하는 시점을 측정하면 시간 차이가 소스의 위치를 알려줍니다.
NVH Source Locator는 다음을 수집합니다:
그런 다음 구조에서 소스가 있는 위치를 계산합니다.
더 많은 센서를 사용할수록 소스를 더 정확하게 찾을 수 있습니다:
필요한 것:
앱 상단에 탭이 있습니다:

| 탭 | 기능 | 사용 시점 |
|---|---|---|
| 2-Sensor | 2개 센서 사이의 선을 따라 1D 소스 위치 측정 | 빠른 확인, 빔 같은 구조. 완전 무료. |
| 3-Sensor | 삼각형의 3개 센서를 사용한 2D 소스 위치 측정 | 가장 일반적인 사용, 패널 및 표면 |
| 3-Sen+ | 과결정 최소 제곱 솔버가 있는 3-Sensor | 더 까다로운 측정, 노이즈에 강함 |
| 4-Sensor | 두 쌍 (A-B + C-D)을 사용한 2D 위치 측정 | 직사각형 센서 레이아웃, 교차 확인 |
| 4-Sen+ | 고급 2D 모드, 임의의 위치에 4개 센서 | 비직사각형 기하학, 전체 LSQ |
| 3D | XYZ 좌표가 있는 4개 센서를 사용한 3D 소스 위치 측정 | 3D 공간의 복잡한 구조 |
| 3D+ | 최대 6개 센서가 있는 3D, 과결정 LSQ | 매우 복잡한 기하학, 최대 정밀도 |
| Materials | 음속 라이브러리 + 사용자 정의 재료 | 측정 세션당 한 번 선택 |
| Help | 앱 내 튜토리얼 및 참조 | 빠른 복습이 필요할 때 |
무료 vs Pro: 2-Sensor 탭은 완전 무료입니다. 다른 탭은 접근 가능하지만 Pro 사용자에게 잠긴 특정 입력 필드(금색 자물쇠 배지로 표시됨)가 있습니다. 잠긴 필드를 탭하면 Pro paywall이 표시됩니다.
설정은 오른쪽 상단의 ⚙ 톱니바퀴 아이콘을 통해 액세스합니다 (탭이 아님).
가장 간단한 측정: 두 개의 가속도계 사이의 선을 따라 소스 위치 측정.
Materials 탭을 탭합니다. 구조가 만들어진 재료를 선택하세요(예: "알루미늄", "강철, Mild (1020)"). 앱은 재료의 알려진 음속을 사용하여 보정 시간 필드를 자동으로 채웁니다.
구조의 재료가 목록에 없는 경우 일시적으로 "공기"를 선택하고 2단계에서 보정 시간을 수동으로 재정의할 수 있습니다.
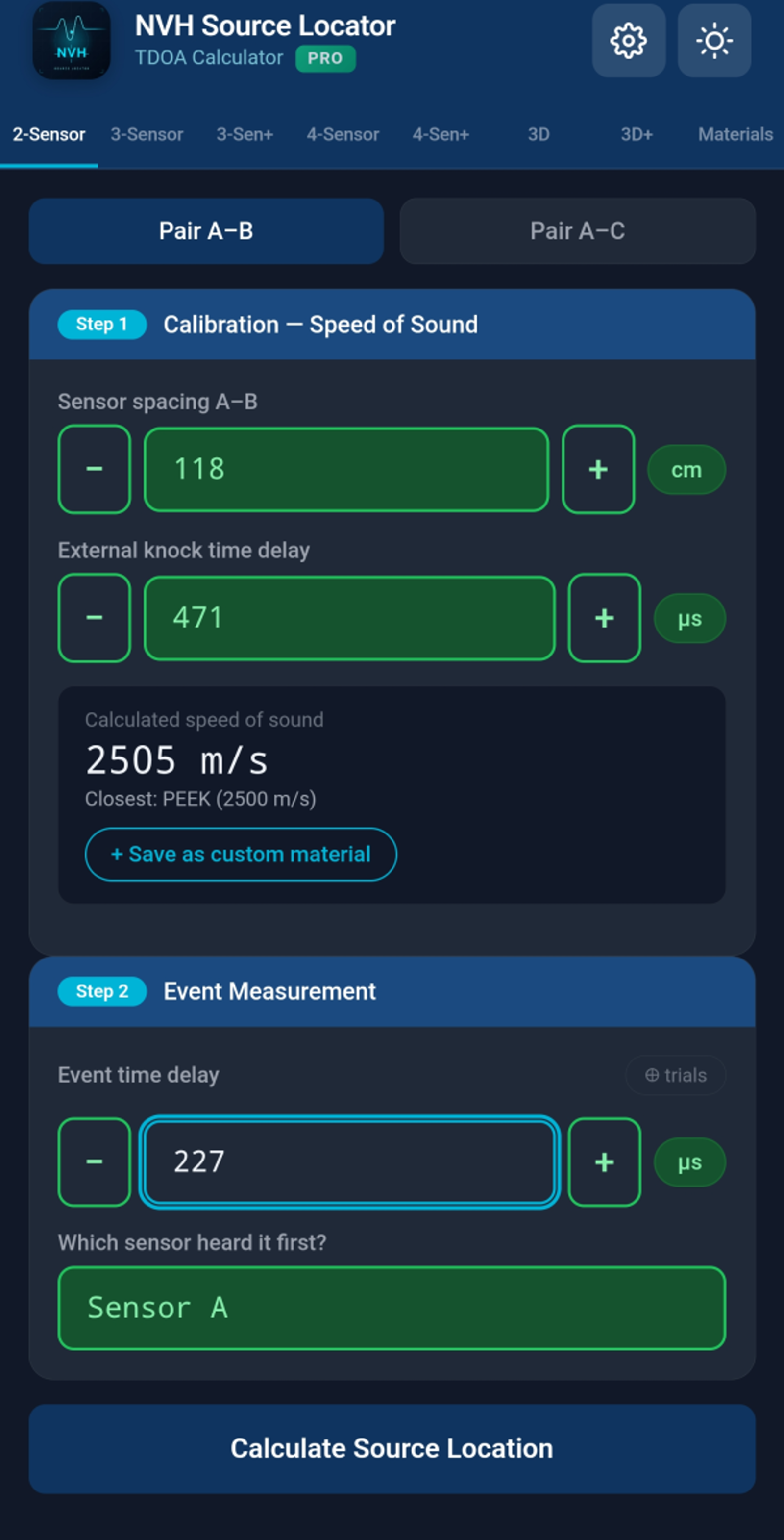
2-Sensor 탭에서 두 개의 쌍 섹션을 볼 수 있습니다: 쌍 A–B 및 쌍 A–C (센서가 2개만 있는 경우 A–B만 필요).
각 쌍에 대해 다음을 입력합니다:
d): 센서 간의 물리적 거리, cm 또는 인치 (설정에서 설정됨)tCal): 재료의 음속으로 파동이 센서 간을 이동하는 데 걸리는 시간 — 재료를 선택하면 자동으로 채워지지만 재정의할 수 있습니다tEvent): 마이크로초 단위로 소음 이벤트를 감지하는 센서 간의 시간 차이앱은 센서 A로부터의 거리로 소스 위치를 표시합니다: - 결과 = 0: 소스가 센서 A에 있음 - 결과 = 거리: 소스가 센서 B에 있음 - 결과가 그 사이: 소스가 그 사이에 있음 - 결과가 외부: 소스가 센서 중 하나를 넘어섭니다 (토스트가 경고함)
결과 카드에는 두 거리(A에서, B에서)가 모두 표시되고 어느 센서가 더 가까운지 표시됩니다.
설정 사진을 찍으려면 📷 사진 주석을 탭합니다. 앱은 센서 A, B 및 소스에 대한 마커를 오버레이합니다. 보고서에 유용합니다.
삼각형에 배치된 세 개의 센서를 사용하여 2D 평면에서 소스를 찾습니다.

삼각형을 형성하는 세 개의 센서를 구조에 배치합니다. 정삼각형, 직각, 또는 부등변 — 앱은 모든 기하학을 처리합니다.
삼각형 변 길이 섹션에서 세 변 (A–B, A–C, B–C)에 대한 물리적 거리를 모두 입력합니다.
각 쌍 (A–B 및 A–C)에 대해 다음을 입력합니다: - tCal: 보정 시간 (재료에서 자동 채워짐) - tEvent: 소음 이벤트에 대한 측정된 시간 차이 - 첫 번째 센서: 먼저 들은 것
앱은 센서 A에 대한 X, Y 좌표로 소스 위치를 표시합니다 (센서 A는 원점에, 센서 B는 X 축에). 시각화는 세 센서 모두와 소스 위치를 보여줍니다.

여러 고급 탭은 과결정 솔버와 더 높은 차원을 제공합니다:
3-Sensor와 같은 삼각형 설정이지만 세 쌍 모두 (A–B, A–C, B–C)를 보정하고 측정합니다. 솔버는 최소 제곱 적합에서 세 개의 TDOA를 모두 사용합니다 — 측정 노이즈와 비등방성 재료에 더 강건합니다. 일관성 없는 측정을 발견할 수 있도록 쌍별 잔차가 보고됩니다.
영역 주위에 네 개의 센서를 배치합니다: - A–B = 수평 쌍 (좌/우 측) - C–D = 수직 쌍 (상/하 측)
A–B 쌍 (수평)을 먼저 실행한 다음 C–D 쌍 (수직)을 실행합니다. 2D 지도는 교차점을 보여줍니다. 각 쌍은 별도로 보정됩니다 — 재료가 구조 전체에 걸쳐 다양한 경우에 유용합니다.
임의의 위치에 네 개의 센서 (직사각형으로 강제되지 않음). A를 B, C, D 각각과 쌍으로 만들고 별도로 보정합니다. 과결정 최소 제곱 솔버는 쌍별 측정 노이즈를 평균화하고 쌍별 잔차를 보고합니다.
3D 공간에 배치된 4개 센서로 완전한 3D 측정. 각 센서의 (X, Y, Z) 좌표와 각 쌍 (A–B, A–C, A–D)에 대한 보정 및 이벤트 시간을 입력합니다.
3D와 같지만 과결정 LSQ로 최대 6개 센서 (A에서 F까지)를 지원합니다. 복잡한 3D 기하학을 위한 최대 정밀도.
20 °C에서 알려진 음속을 가진 일반 엔지니어링 재료 라이브러리.

목록에는 공기, 유체, 고무, 폴리머, 나무, 유리, 금속이 포함됩니다. 속도는 ~340 m/s (공기)에서 ~13,000 m/s (실온의 일부 금속)까지 다양합니다.
일반적으로 사용되는 14개 금속에는 온도 계수 데이터가 포함되어 있습니다. 설정의 참조 온도가 20 °C와 다를 경우 앱은 이러한 재료의 속도를 자동으로 조정합니다:
보정이 있는 재료는 선택기에 두 개의 값을 표시합니다: 보정된 속도 (큰, 두드러진)와 20 °C의 참조 속도 (작은, 회색 아래에).
보정이 없는 재료는 이탤릭체로 "ref only"를 표시합니다 — 표시된 속도는 온도와 관계없이 그대로 사용됩니다.
2-Sensor 탭에서 보정을 측정하면 결과를 사용자 정의 재료로 저장할 수 있습니다. 성공적인 2-sensor 측정 후 선택한 이름으로 파생 속도를 저장하는 옵션을 찾으세요.
사용자 정의 재료는 in-situ 측정된 속도를 저장합니다. 온도 보정을 적용하지 않습니다 (속도는 이미 시험 온도에서 측정되었습니다).
재료 옆의 별표를 탭하여 즐겨찾기로 표시합니다. 즐겨찾기는 빠른 액세스를 위해 목록 상단에 표시됩니다.
상단의 검색 표시줄을 사용하여 재료를 이름으로 필터링합니다. 검색은 영어 표준 이름과 번역된 표시 이름 모두와 일치합니다.
재료의 음속은 온도에 따라 변합니다. 자동차 NVH 테스트에서 이것은 중요합니다: 80 °C의 엔진실, -10 °C의 차가운 캐빈, 또는 200 °C의 배기 매니폴드 영역은 모두 실온의 실험실 조건과 다르게 동작합니다.
설정 (⚙ 아이콘) → 참조 온도를 엽니다. 시험 환경의 온도를 °C로 입력합니다 (범위 -40에서 +200).

앱을 시작할 때 참조 온도는 항상 20 °C로 재설정됩니다. 이는 과거 측정 세션의 오래된 설정이 오늘의 작업에 조용히 영향을 미치는 것을 방지합니다. 설정의 작은 이탤릭체 메모는 이 동작을 상기시켜 줍니다.
원래 온도에서 기록 측정을 재생하려면 항목을 탭하기만 하면 됩니다 — 온도가 자동으로 복원됩니다.
대부분의 비금속 재료에는 신뢰할 수 있는 게시된 온도 계수가 없습니다. 앱은 이러한 재료에 대해 "ref only" 배지를 표시합니다 — 표시된 속도는 온도 설정과 관계없이 사용됩니다. 이러한 재료에 대해 실온이 아닌 온도에서 정확한 측정이 필요한 경우 in-situ 보정을 수행하고 결과를 사용자 정의 재료로 저장하세요.
성공적인 계산 후 📷 사진 주석 버튼을 탭하여 설정 사진에 센서와 소스 마커를 오버레이합니다.

주석이 달린 사진은 자동으로 PDF 보고서에 포함됩니다.
형식이 지정된 보고서를 생성하려면 결과 화면의 결과 인쇄 버튼을 탭합니다.

설정 → 보고서 헤더. 회사 이름, 연구실 이름, 프로젝트 정보, 또는 각 보고서 상단에 원하는 것을 입력합니다.
모든 사용자 정의 재료, 즐겨찾기, 설정, 기록을 단일 파일에 저장합니다. 장치 간 전송.
설정 → 백업 → "백업 파일 저장"을 탭합니다. 앱이 JSON 파일을 생성하고 휴대폰의 공유 시트를 엽니다. 클라우드 드라이브(Google Drive, iCloud, OneDrive)에 저장하거나 자신에게 이메일로 보내거나 원하는 방법으로 전송합니다.
설정 → 복원 → 휴대폰 저장소에서 백업 파일을 선택합니다. 앱은 사용자 정의 재료, 즐겨찾기, 기록, 설정을 가져옵니다.
⚠️ 복원은 현재 데이터를 대체합니다. 현재 장치에 중요한 측정이 있는 경우 다른 백업에서 복원하기 전에 먼저 백업하세요.
오른쪽 상단의 ⚙ 톱니바퀴 아이콘을 통해 액세스합니다. 설정은 모달이며 탭이 아닙니다.
| 설정 | 제어하는 것 |
|---|---|
| Pro로 업그레이드 | Pro 기능 구매 또는 학습 ($19.99) |
| 언어 | 앱 표시 언어 (30개 지원) |
| 테마 | 밝게, 어둡게, 또는 자동 (시스템 따르기) |
| 거리 단위 | cm 또는 인치 |
| 참조 온도 | 보정을 위한 활성 온도, -40에서 +200 °C |
| 보고서 헤더 | 생성된 보고서 상단의 사용자 지정 텍스트 |
| 백업 | 모든 데이터를 파일로 내보내기 |
| 복원 | 백업 파일에서 데이터 가져오기 |
| 구매 복원 | 새 장치에서 Pro 재취득 |
NVH Source Locator는 기능 잠금 freemium 모델을 사용합니다:
Pro 필수 필드는 다음에 흩어져 있습니다: - 3-Sensor, 3-Sen+, 4-Sensor, 4-Sen+ - 3D 및 3D+ 모드 - 백업 및 복원 - PDF 보고서 - 사용자 정의 재료 - 사진 주석
무료 사용자는 모든 탭을 열고 인터페이스를 볼 수 있습니다. Pro 잠금 입력 필드에 값을 입력할 수 없을 뿐입니다.


무료 사용자가 잠긴 필드를 탭하면 paywall이 슬라이드되어 다음을 표시합니다: - PRO 배지가 있는 앱 아이콘 - 기능 목록 - 가격이 있는 잠금 해제 버튼 ($19.99 기본; 지역에 따라 다를 수 있음) - 프로모 코드 사용 (Android만 해당 — iOS는 Apple의 별도 Offer Code 흐름을 사용) - 커뮤니티 채널에 대한 선택적 프로모 링크
잠긴 필드를 탭하거나 설정에서 Pro로 업그레이드를 탭합니다. 플랫폼의 공식 결제 시스템을 사용합니다 (Android의 Google Play, iOS의 Apple App Store).
한 장치에서 구매하고 다른 장치(같은 계정)에서 Pro를 원하는 경우:
NVH Source Locator가 백그라운드에서 실행되는 동안 Google Play 스토어 또는 App Store에서 프로모 코드를 사용하면 앱으로 돌아갈 때 새 구매가 자동으로 감지되고 Pro가 잠금 해제됩니다 — 수동 복원이 필요하지 않습니다.
Android: paywall의 "Google Play 프로모 코드가 있으신가요?" 버튼은 코드가 미리 입력된 Google Play 사용 흐름을 엽니다.
iOS: App Store 정책 3.1.1은 Apple의 공식 "코드 사용" 흐름을 통한 사용을 요구합니다. Google Play 버튼은 iOS에 숨겨져 있습니다. 대신 설정에서 "App Store 코드 사용"을 찾으세요.
Help 탭에는 앱 내 튜토리얼, 모범 사례 가이드, 참조 정보가 포함되어 있습니다.

다루는 주제: - 필요한 장비 - 최고의 정확도를 위해 센서를 배치하는 방법 - 보정 팁 - 일반적인 측정 시나리오 - 삼각측량 및 3D 배치를 위한 팁 - 케이블 라우팅 및 신호 품질
tCal은 게시된 재료 속도를 가정합니다 — 실제 재료는 다양합니다. 가장 정확한 보정은 in-situ입니다: 알려진 위치를 탭하고 앱이 실제 속도를 도출하도록 하세요.수학에 따르면 소스가 센서 사이에 있지 않습니다. 가능한 원인: - 소스가 실제로 센서 라인/평면 외부에 있습니다 - 입력 중 하나가 잘못되었습니다 - 보정 속도가 현실과 너무 멀리 떨어져 있습니다
입력에서 함축된 음속은 일반적인 재료에서 멀리 떨어져 있습니다 (50 m/s 미만 또는 20,000 m/s 초과). 입력을 확인하세요 — tCal 또는 거리의 오타일 가능성이 높습니다.
설정에서 참조 온도를 확인하세요. 20 °C가 아닌 경우 표시된 속도는 온도 보정을 반영합니다. 앱은 보정된 속도 아래에 "ref X @ 20°C"를 표시하므로 확인할 수 있습니다.
앱 버전 1.75 이전에 생성된 오래된 기록 항목은 온도를 저장하지 않았을 수 있습니다. 20 °C가 아닌 온도에서 측정한 경우 재생은 현재 설정을 사용합니다. 재생하기 전에 설정에서 수동으로 온도를 설정하거나 다시 측정하세요.
마커는 입력 기하학을 기반으로 자동 배치됩니다. 조정하려면 드래그하세요. 마커를 조정하면 사진 오버레이의 소스 위치가 업데이트됩니다 — 그러나 기본 계산 결과는 변경되지 않습니다.
앱의 동일하거나 최신 버전에서 생성된 백업 파일을 사용하는지 확인하세요. 오래된 백업 파일에는 현재 데이터 필드가 없을 수 있습니다.
설계에 따라: 숫자 필드에서 포커스를 잃을 때 (다른 곳을 탭) 비어 있거나 음수이거나 숫자가 아닌 텍스트를 포함하면 0으로 스냅됩니다. 실수로 지워진 입력으로 인한 조용히 깨진 계산을 방지합니다. 온도 입력은 예외입니다 (대신 -40/+200으로 클램프됨).
다음과 함께 support@evdiag.net에 문의하세요:
- 기기 모델 및 OS 버전
- 앱 버전 (설정 → 페이지 하단)
- 시도한 내용의 설명
- 가능하면 스크린샷
NVH Source Locator는 EVDiag가 개발했습니다. 업데이트 및 리소스를 보려면 https://evdiag.net을 방문하세요.